
伺服液压运动控制:选择PLC还是运动控制器?
你也许无法在教科书里找到比例增益公式推导的来源。然而,液压系统设计工程师实际上知道如何控制最优的比例增益,因为他们必须确定阻尼系数,自然频率以及开环增益。通常,自然频率是根据油液的体积弹性模量,液压缸作用面积,油液压缩量,质量等计算而来。因为跟踪误差取决于开环增益和比例增益,液压设计者必须控制跟踪误差。
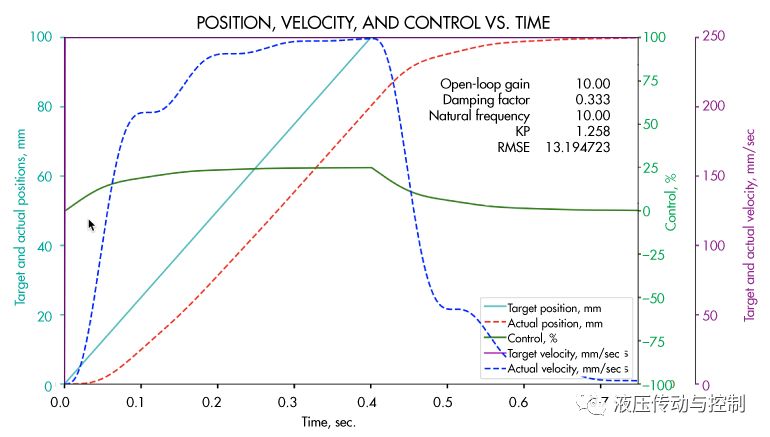
3.该仿真显示了添加一个简单的目标发生器所带来的好处。需要注意的是控制输出并不饱和,实际位置移动更平滑。速度达到期望值的250mm/s(100mm/0.4s)。加速度小很多。速度比例与第1和第3个仿真有很大不同。
对于比例控制的其它思考
假如控制系统已经调定好,并开始一段短行程的运动,并工作起来似乎很正常。试图运动更长一点的距离,两次运动消耗几乎相同的时间。原因就在于随着误差减小,控制输出也减小,因此速度也会大幅减小。对于实际的位置,如果减小的误差低于原始误差1%,其将消耗5倍的时间常数。
时间常数就是控制对象减小63%的错误所用的时间。因此,如果误差迅速上升10mm,而时间常数是1s,误差将在1s之后降至3.68mm。2s之后,误差将降至1.35mm。在5倍的时间常数(5s)之后,误差将减小至0.067mm-低于原始误差10mm的1%。时间常数决定了控制系统将要花多少时间来响应系统的干扰。
现在问题就是,对于一个仅仅采用比例增益的液压缸,如何计算其时间常数?公司并不难:
τ 是最优时间常数。
τ = 3/(2 ? ζ? ωn )
如果阻尼是0.33333,自然频率是10Hz,则时间常数是:
τ = 3/(2 ? 0.333 ? 2 ? π ? 10) = 0.072 s.
因为其消耗5倍的时间常数以达到减小误差至1%,运动过程则将需要0.358s。
需要再次注意的是,最优的时间常数完全由机械(液压)设计者来决定。5倍时间常数的时间过长,液压系统设计者就需要考虑提高自然频率,或者通过增加摩擦提高阻尼。增加摩擦浪费能源。提高自然频率需要增加液压缸缸径,而且也会增大阀通径,蓄能器容积,泵能力以及增加的元件成本。
采用带PLC的简单的比例控制液压系统似乎容易得多,但是PLC编程人员对很多重要的参数并没有去控制。这种约束并不是编程人员的能力问题,而是液压和机械设计方面的原因。不幸的是,PLC编程人员通常是最后一个接触到液压系统的人,他被寄希望于“机械和液压问题,让电气和软件来解决”,然而,这种事实,不会总是发生。系统的特性行为在设计和制造阶段已经定性了。
设备的性能可以通过使用精密的液压伺服控制系统得到提高。初始的成本会很高,但是其性能也提升了。设备也变得易于维护,需要的维护频率也不高了。
下面是仅仅采用比例控制的简单运动的三种仿真。它们基于标准的线性化运动仿真模块,用于伺服液压缸和负载。
H(s) = (K ? ω2n)/[s ? (s2 + 2 ? ζ ? ωn ? s + ω2n)]
K,- 开环增益,假定为10 (mm/s)/%的控制输出,
s, - 拉普拉斯算子,是一个频率,弧度/s,
ζ - 阻尼系数,假定为0.33333,无量纲,
ωn - 自然频率,弧度/s。示例中自然频率为10Hz。
这些仿真给你提出了一些问题,譬如:如何提高响应时间?这些问题将会在后续的讨论中进行回答。
