| ГЄЩГФЮХЗЮїУХзг6ES7221-1BH32-0XB0 |
 |
МлИёЃК100 дЊ(ШЫУёБв) | ВњЕиЃКЕТЙњ |
| зюЩйЦ№ЖЉСПЃК1ЬЈ | ЗЂЛѕЕиЃККўФЯГЄЩГЪа | |
| ЩЯМмЪБМфЃК2019-04-18 11:30:21 | фЏРРСПЃК418 | |
ГЄЩГФЮХЗздЖЏЛЏЩшБИгаЯоЙЋЫО
 |
||
| ОгЊФЃЪНЃКОЯњЩЬ | ЙЋЫОРраЭЃКЫНгЊгаЯод№ШЮЙЋЫО | |
| ЫљЪєаавЕЃКPLCПижЦЯЕЭГ | жївЊПЭЛЇЃКШЋЙњ | |
 дкЯпзЩбЏ дкЯпзЩбЏ  |
||
| СЊЯЕШЫ:СѕЮФау (ЯШЩњ) | ЪжЛњ:13762110473 |
ЕчЛА: |
ДЋец: |
| гЪЯф:1533714462@qq.com | ЕижЗ:КўФЯЪЁГЄЩГЪадРТДЧјЬьЖЅНжЕРМтЩНАВжУЙЋдЂТЅ702КХ |
|
ГЄЩГФЮХЗЮїУХзг6ES7221-1BH32-0XB0 ГЄЩГФЮХЗЮїУХзг6ES7221-1BH32-0XB0 SIMATIC S7-1200ЃЌЪ§зжЪфШы SM 1221ЃЌ16Ъ§зжЪфШыЃЌ24V DCЃЌ ЙрЕчСї/РЕчСї
ГЄЩГФЮХЗздЖЏЛЏЩшБИгаЯоЙЋЫОЃЈЮїУХзгЯЕЭГМЏГЩЩЬЃЉГЄЦкЯњЪлЮїУХзгS7-200/300/400/1200PLCЁЂЪ§ПиЯЕЭГЁЂБфЦЕЦїЁЂШЫЛњНчУцЁЂДЅУўЦСЁЂЫХЗўЁЂЕчЛњЁЂЮїУХзгЕчРТЕШЃЌВЂПЩЬсЙЉЮїУХзгЮЌаоЗўЮёЃЌЛЖгРДЕчДЙбЏ
СЊЯЕШЫЃКСѕЮФау ЃЈЯњЪлОРэЃЉ
ЪжЛњ ЃК13762110473
QQ ЃК 1533714462
ЕижЗЃКГЄЩГЪадРТДЧјЬьЖЅНжЕРМтЩНАВжУЙЋдЂТЅ702
PID вЦжВ
S7-200 SMART гы S7-200вЛбљЃЌжЇГж8ТЗPIDПижЦЃЌжЇГжФЃФтСПЪфГіМАPWMЪфГі
НЋ S7-200 ДјгаPIDЯђЕМЩњГЩЕФГЬађгУ S7-200 SMARTДђПЊЃЌЬсЪОДэЮѓЃЌШчЯТЭМЫљЪОЃК
ЭМ1. S7-200 PIDГЬађдкS7-200 SMART ДђПЊБЈДэ
НтОіЗНЗЈЃК
1ЃЌаТНЈ S7-200 SMARTЯюФПЃЌВЂНјаае§ШЗЕФЩшБИзщЬЌ
2ЃЌНЋ S7-200ГЬађгУSTEP 7-Micro/win SMART ШэМўДђПЊЃЌНЋГ§PIDзгГЬађжЎЭтЕФГЬађЖЮИДжЦЕНаТЯюФП
3ЃЌаоИФаТЯюФПЕФ I/O ЕижЗМАФЃФтСПзЊЛЛСПГЬгыS7-200 SMART ЦЅХф
БШНЯ S7-200 гы S7-200 SMART PIDЛиТЗБэЃЌСНепЭъШЋЯрЭЌЃЌШчЯТБэЫљЪОЃК
Бэ1. S7-200 гы S7-200 SMART PID ЛиТЗЖдБШБэ
ЦЋвЦ
РраЭ
Й§ГЬБфСП(PVn)
АќКЌЙ§ГЬБфСПЃЌЦфжЕБиаыБъЖЈдк 0.0 ЕН 1.0 жЎМф
ЩшЖЈжЕ(SPn)
АќКЌЩшЖЈжЕЃЌЦфжЕБиаыБъЖЈдк 0.0 ЕН 1.0 жЎМф
ЪфГі(Mn)
АќКЌМЦЫуГіЕФЪфГіЃЌЦфжЕБиаыБъЖЈдк 0.0 ЕН 1.0 жЎМф
дівц(Kc)
АќКЌдівцЃЌЮЊБШЧÁڧЁЃ ПЩвдЪЧе§Ъ§ЛђИКЪ§
ВЩбљЪБМф
АќКЌВЩбљЪБМфЃЌЕЅЮЛЮЊУыЁЃ БиаыЪЧе§Ъ§
Л§ЗжЪБМф
АќКЌЛ§ЗжЪБМфЛђИДЮЛЃЌЕЅЮЛЮЊЗж
ЮЂЗжЪБМф
АќКЌЮЂЗжЪБМфЛђЫйТЪЃЌЕЅЮЛЮЊЗж
ЦЋжУ
АќКЌЦЋжУЛђЛ§ЗжКЭжЕЃЌНщгк 0.0 ЕН 1.0 жЎМф
ЧАвЛЙ§ГЬБфСП
АќКЌЩЯДЮжДаа PID жИСюЪБДцДЂЕФЙ§ГЬБфСПжЕ
PIDРЉеЙБэ
ЁЎPIDAЁЏЃЈPID РЉеЙБэЃЌАцБО AЃЉЃК ASCII ГЃЪ§
AT ПижЦ
AT зДЬЌ
AT НсЙћ
AT ХфжУ
ЦЋВю
зюДѓ PV еёЕДЗљЖШЕФБъзМЛЏжЕЃЈЗЖЮЇЃК 0.025 ЕН 0.25ЃЉ
жЭКѓ
гУгкШЗЖЈЙ§СуЕФ PV жЭКѓБъзМЛЏжЕЃЈЗЖЮЇЃК 0.005 ЕН 0.1ЃЉ
ГѕЪМЪфГіНздО
ЪфГіжЕжаНздОБфЛЏЕФБъзМЛЏДѓаЁЃЌгУгкЪЙ PV ВњЩњеёЕДЃЈЗЖЮЇЃК0.05 ЕН 0.4ЃЉ
ПДУХЙЗЪБМф
СНДЮЙ§СужЎМфдЪаэЕФзюДѓУыЪ§жЕЃЈЗЖЮЇЃК60 ЕН 7200ЃЉ
НЈвщдівц
здећЖЈЙ§ГЬШЗЖЈЕФНЈвщЛиТЗдівц
НЈвщЛ§ЗжЪБМф
здећЖЈЙ§ГЬШЗЖЈЕФНЈвщЛ§ЗжЪБМф
НЈвщЮЂЗжЪБМф
здећЖЈЙ§ГЬШЗЖЈЕФНЈвщЮЂЗжЪБМф
ЪЕМЪНздОДѓаЁ
здећЖЈЙ§ГЬШЗЖЈЕФБъзМЛЏЪфГіНздОДѓаЁжЕ
ЪЕМЪжЭКѓ
здећЖЈЙ§ГЬШЗЖЈЕФБъзМЛЏ PV жЭКѓжЕ
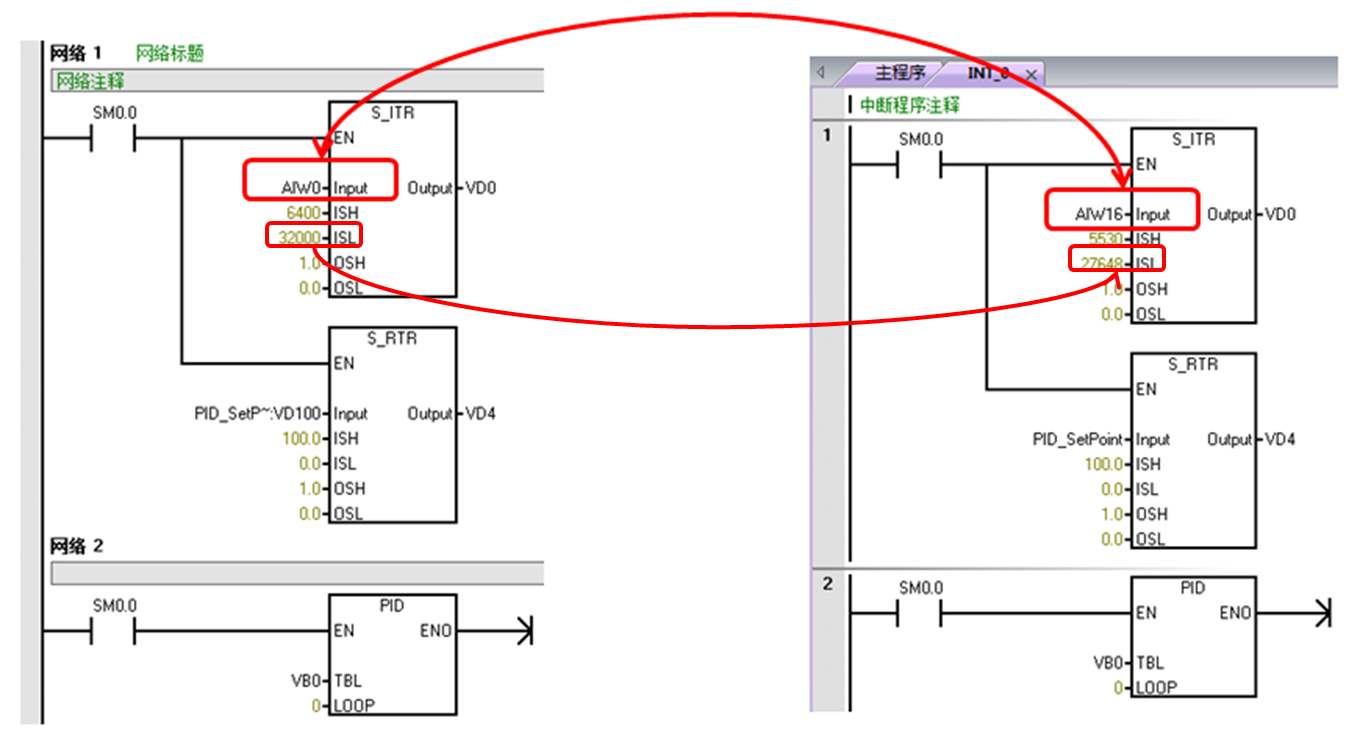
ШчЩЯБэЫљЪОЃЌСНепPIDЛиТЗБэЭъШЋвЛжТЃЌЫљвдЃЌЕБНЋS7-200 PID жИСюБрГЬНјаавЦжВЪБЃЌашНЋЗДРЁгыЪфГіЕФФЃФтСПЕижЗАДее S7-200 SMART ЕФЕижЗЗжХфНјаааоИФЃЌЭЌЪБаоИФФЃЪ§зЊЛЛЪ§жЕМДПЩЁЃШчЯТЭМЫљЪОЃК
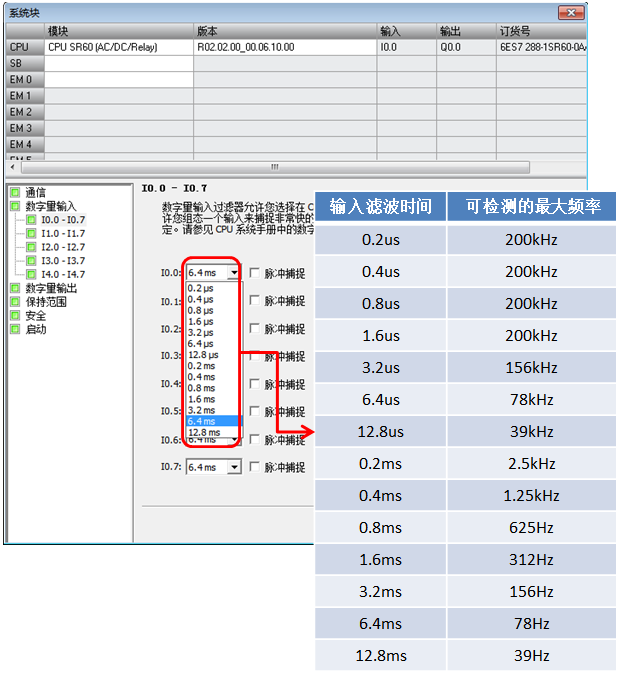
S7-200 жЇГж6ТЗ30KHzЕФИпЫйМЦЪ§ЦїЃЈ224XPжЇГж200KHzЃЉЃЌжЇГж13жжФЃЪНЃЛS7-200 SMARTжЇГж4ТЗ200KHzЃЈCR40/60НіжЇГж100KHzЃЉИпЫйМЦЪ§ЦїЃЌжЇГж8жжФЃЪНЃЌЯъЯИЖдБШВЮПДЯТБэЃК
Бэ1. S7-200 ИпЫйМЦЪ§ЙІФм
КьЩЋЃКS7-200 SMART ВЛжЇГжЕФЙІФмЁЃ
Бэ2. S7-200ИпЫйМЦЪ§ЦїбАжЗ
Бэ3. S7-200 SMART ИпЫйМЦЪ§ЙІФм
Бэ4. S7-200 SMART ИпЫйМЦЪ§ЦїбАжЗ
зЂвтЃК
1ЃЌS7-200 SMART ВЛжЇГжФЃЪН2ЁЂФЃЪН5ЁЂФЃЪН8ЁЂФЃЪН11ЁЂФЃЪН12ЃЈдкдЫЖЏПижЦЯђЕМЪБЙДбЁЃЉЃЛ
2ЃЌS7-200 SMART зіИпЫйМЦЪ§ашвЊгВМўТЫВЈЃЌШчЯТЭМЫљЪОЃК
ЭМ1. S7-200 SMART ТЫВЈЪБМфгыЦЕТЪЙиЯЕ
зЂЃКCR40/60 СНПюCPUзюИпжЇГж 100kHz ЦЕТЪ
вдS7-200 224XPОйР§ЃЌЪЙгУИпЫйМЦЪ§HSC0ЃЌФЃЪН9ЃЌЗжБ№РћгУжИСюгыЯђЕМЗжБ№БрГЬЃЌШЛКѓвЦжВЕНS7-200 SMART
ЪзЯШЃЌНЋS7-200 ИпЫйМЦЪ§ЯђЕМгыS7-200 SMARTИпЫйМЦЪ§ЯђЕМКсЯђЖдБШЃЌШчЯТЭМЫљЪОЃК
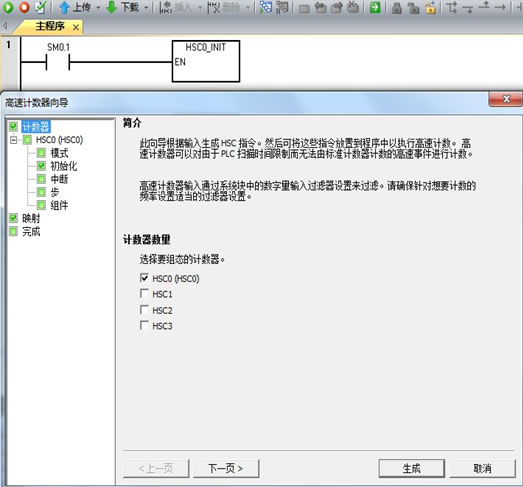
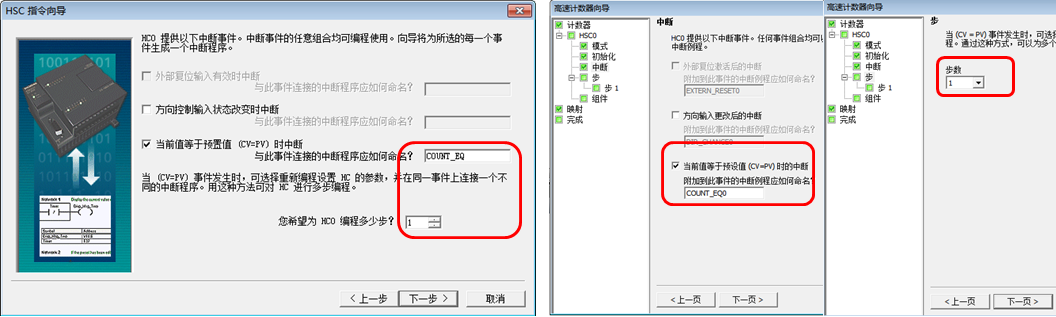
ЭМ2. ИпЫйМЦЪ§ЦїМАФЃЪНбЁдё
ЭМ3. HSC ГѕЪМЛЏбЁЯю
ЭМ4.ХфжУжаЖЯМАВНжш
ЭМ5. HSC Ек 1 ВН
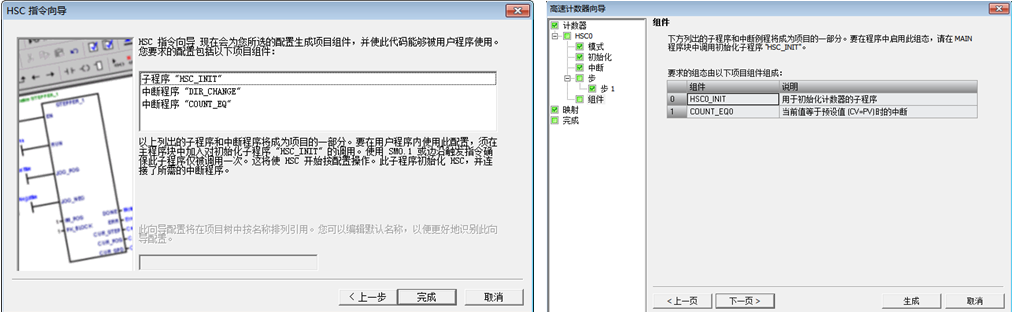
ЭМ6. ЭъГЩЯђЕМ
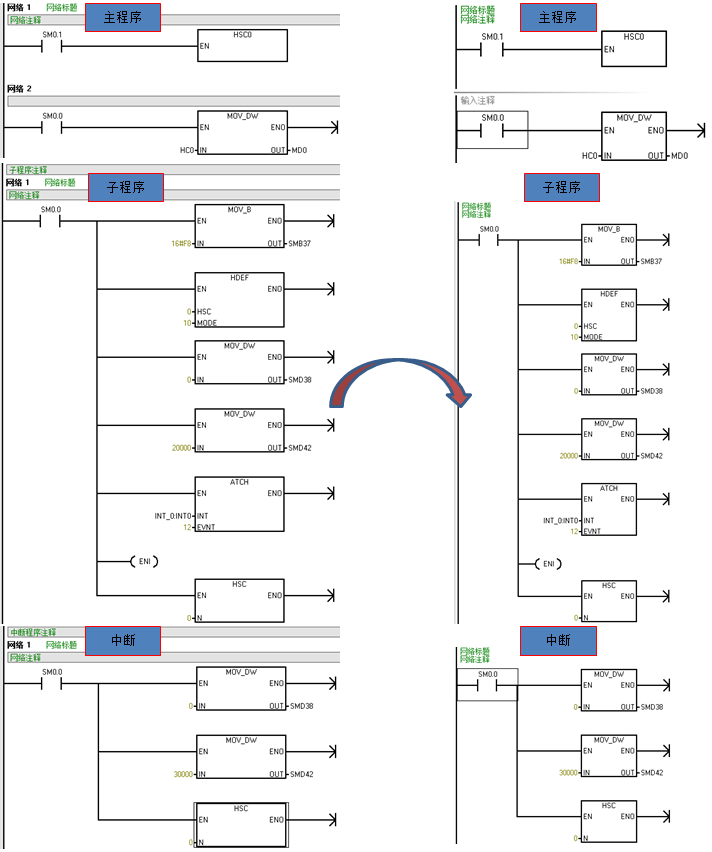
ШчЩЯЭМЫљЪОЃКS7-200 ИпЫйМЦЪ§ЯђЕМзщЬЌгыS7-200 SMARTИпЫйМЦЪ§ЯђЕМзщЬЌвЛжТЁЃ
ОпгаЯрЭЌЙІФмгЩЯђЕМЩњГЩЕФ S7-200 ЯюФППЩжБНггУS7-200 SMART ДђПЊЃЌАДеевдЯТВНжшвЦжВЃК
ВНжш1ЃКгУSTEP 7 Micro/Win SMART ДђПЊS7-200 ЕФдГЬађ
ВНжш2ЃКАДееЁЖБэ3. S7-200 SMART ИпЫйМЦЪ§ЙІФмЁЗЃЌНјааИпЫйМЦЪ§ЭЈЕРЕФНгЯп
ВНжш3ЃКАДееЁЖЭМ1. S7-200 SMART ТЫВЈЪБМфгыЦЕТЪЙиЯЕЁЗЃЌНјааИпЫйМЦЪ§ЭЈЕРТЫВЈЪБМфЕФЩшжУ
ВНжш4ЃКБрвыЯТдиЃЌЯТдиМДПЩЁЃШчЯТЭМЪОЃК
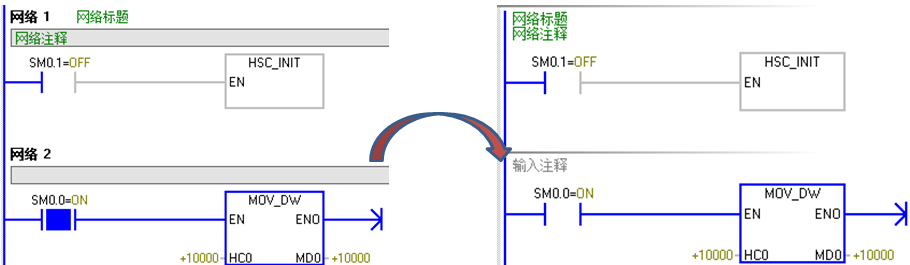
ЭМ7. ГЬађЖдБШ
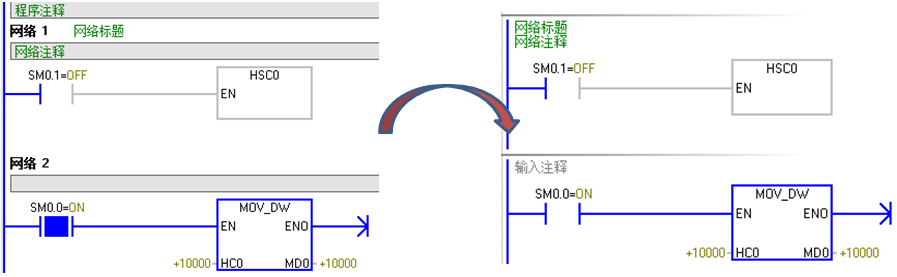
ЪзЯШЃЌНЋ S7-200 ИпЫйМЦЪ§ЕФЬиЪтДцДЂЦї ( SM ) гы S7-200 SMART ИпЫйМЦЪ§ЕФЬиЪтДцДЂЦї ( SM ) КсЯђЖдБШЃЌвд HSC0 ШчЯТБэЫљЪОЃК
Бэ5. S7-200 гы S7-200 SMART ЬиЪтДцДЂЦїЃЈSMЃЉЖдБШ
SM36.0~SM36.4
гЩЩЯБэПЩМћЃЌS7-200 гы S7-200 SMART ЬиЪтДцДЂЦїЃЈSMЃЉЭъШЋвЛжТЁЃ
НЋ S7-200гы S7-200 SMART ИпЫйМЦЪ§жаЖЯЪТМўЙІФмКсЯђЖдБШЃЌШчЯТБэЫљЪОЃК
Бэ6. S7-200 гы S7-200 SMART жаЖЯЪТМўЙІФмЖдБШ
гЩЩЯБэПЩМћЃЌS7-200 SMART гы S7-200 ЯрБШЃЌS7-200 SMART ИпЫйМЦЪ§ЙІФмЫљжЇГжЕФжаЖЯгы S7-200 ЯрЭЌЁЃ
ОпгаЯрЭЌЙІФмгЩжИСюЩњГЩЕФ S7-200 ЯюФППЩжБНггУS7-200 SMART ДђПЊЃЌАДеевдЯТВНжшвЦжВЃК
ВНжш1ЃКгУSTEP 7 Micro/Win SMART ДђПЊS7-200 ЕФдГЬађ
ВНжш2ЃКАДееЁЖБэ3. S7-200 SMART ИпЫйМЦЪ§ЙІФмЁЗЃЌНјааИпЫйМЦЪ§ЭЈЕРЕФНгЯп
ВНжш3ЃКАДееЁЖЭМ1. S7-200 SMART ТЫВЈЪБМфгыЦЕТЪЙиЯЕЁЗЃЌНјааИпЫйМЦЪ§ЭЈЕРТЫВЈЪБМфЕФЩшжУ
ВНжш4ЃКБрвыЯТдиЃЌЯТдиМДПЩЁЃШчЯТЭМЪОЃК
ЭМ8. ГЬађЖдБШ
ЭМ9. ЙІФмВтЪд
Д№ЃКВЛФмЃЌЮоТлЪЧЯђЕМЩњГЩЃЌЛЙЪЧжИСюЩњГЩЃЌЖМВЛФмвЦжВЕНS7-200 SMARTЁЃ
Д№ЃКS7-200 SMARTБиаыаоИФгВМўЕижЗЕФТЫВЈЪБМфЁЃ
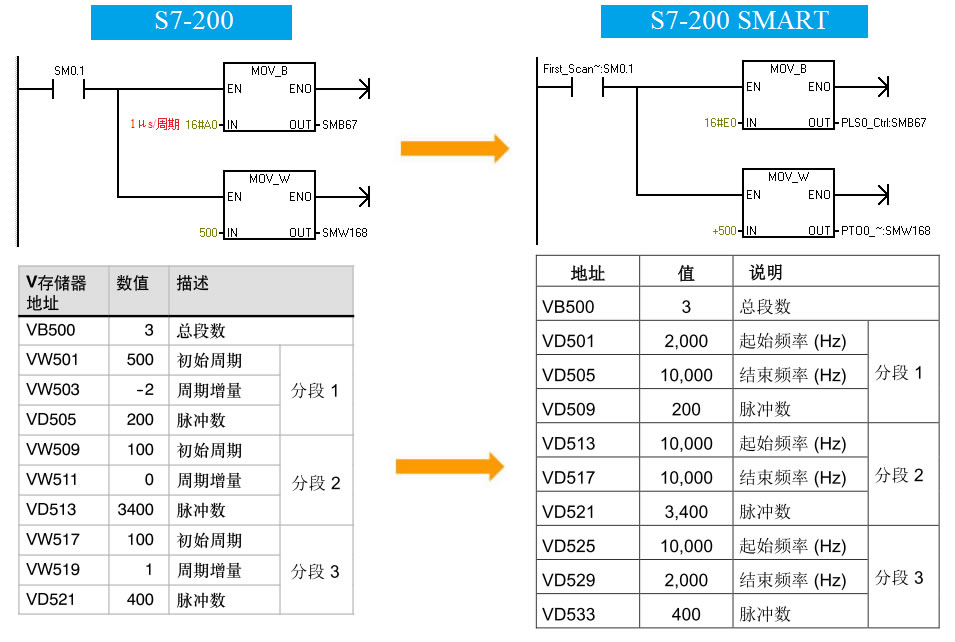
S7-200 гы S7-200 SMART ЪЙгУPLSжИСюПижЦТіГхДЎЪфГіЃЈPTOЃЉЕФSM ЖЈвхВЛЭЌЃЌВЛФмНЋ S7-200 CPU БраДЕФ PLSжИСюГЬађжБНггУгкS7-200 SMARTЁЃ
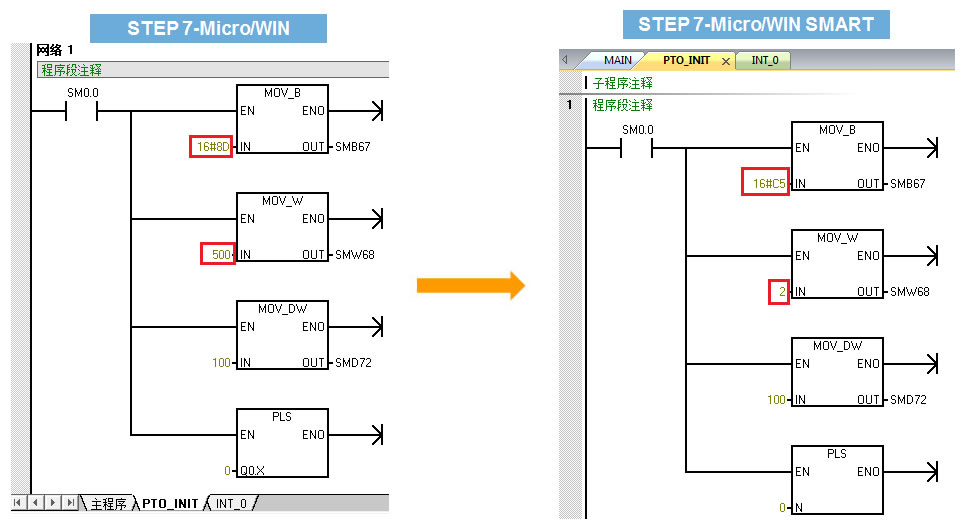
ШчБэ1ЫљЪОЃЌЪЙгУ STEP 7-Micro/Win SMART ДђПЊS7-200 CPU ЕФ PLS жИСюГЬађашаоИФПижЦзжНкЃЈSM67.6ЃЉКЭИќИФжмЦкЮЊЦЕТЪЃЈSMW68ЃЉЁЃ
Бэ1. S7-200 гы S7-200 SMART ЕФSM ЖдБШ
ЪЙгУ STEP 7-Micro/Win SMART ДђПЊS7-200 CPU ЕФ PLS жИСюГЬађашаоИФПижЦзжНкЃЈSM67.6ЃЉКЭИќИФжмЦкЮЊЦЕТЪЃЈSMW68ЃЉЁЃ
Р§ШчЃКдк S7-200 ГЬађРяЃЌБраД 500ms/жмЦкЃЈSMB67=16#8DЃЌSMW68=500msЃЉЃЌзАдижмЦкКЭТіГхЕФPTO ЪфГіГЬађЃЌвЦжВжСS7-200 SMARTашвЊаоИФSMB67=16#C5ЃЌSMW68=2HzЁЃ
ЭМ1. PLSжИСюЕЅЖЮPTOвЦжВ
ЯрЖдгк S7-200 ЖрЖЮ PTO МЦЫужмЦкдіСПЕФЗНЪНЃЌS7-200 SMART ЖрЖЮ PTO ЩшжУИќМђЕЅЃЌжЛашвЊЖЈвхЦ№ЪМЁЂНсЪјЦЕТЪКЭТіГхМЦЪ§МДПЩЃЌШчЭМ2ЫљЪОЁЃвђДЫвЦжВЪБашвЊжиаТБраДPTOЖрЖЮЙмЕРЛЏГЬађЁЃ
ЖдгквРеежмЦкЪБМфЃЈЖјЗЧЦЕТЪЃЉЕФS7-200ЯюФПвЦжВжСS7-200smartЪБЃЌПЩвдЪЙгУвдЯТЙЋЪНРДНјааЦЕТЪзЊЛЛЃК
CTFinal = CTInitial + (ІЄCT * PC)
FInitial = 1 / CTInitial
FFinal = 1 / CTFinal
ШчЭМ3ЫљЪОЃЌPLSжИСюЖрЖЮPTOвЦжВЪБЮоТл S7-200 жаЖЈвхЕФSMB67ЮЊ16#A0ЃЈ1ІЬs/жмЦкЃЉЛЙЪЧ16#A8ЃЈ1ms/жмЦкЃЉЃЌS7-200 SMARTжаЖМашвЊИФЮЊ16#E0ЁЃЦ№ЪМЁЂНсЪјЦЕТЪИљОнЙЋЪНМЦЫуЃЌТіГхЪ§ВЛашвЊИФБфЁЃ
ЭМ3. PLSжИСюЖрЖЮPTOвЦжВ
МЦЫуАќТчЖЮЕФМгЫйЖШЃЈЛђМѕЫйЖШЃЉКЭГжајЪБМфгажњгкШЗЖЈе§ШЗЕФАќТчБэжЕЃЌПЩАДШчЯТЙЋЪНМЦЫу Ts ЖЮГжајЪБМфЃК
ІЄF = FFinal - FInitial
Ts = PC / (Fmin + (|ІЄF| / 2 ) )
As = ІЄF / Ts
S7-200 SMART CPU УЛгаРрЫЦ S7-200 CPU ЕФИпЫйМЦЪ§ЦїФЃЪН 12 ЙІФмЁЃ
S7-200 SMART CPU гВМўТіГхЪфГіНгЕНЪфШыЃЌХфжУИпЫйМЦЪ§ЦїЯђЕМВЂЕїгУ HSC згГЬађПЩМрЪг PTO ТіГхЪ§СП ЁЃШчЯТЭМ4ЫљЪОЃК
ЭМ4. S7-200 SMART PTO ТіГхЪ§ВтСП
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| АцШЈЩљУїЃКвдЩЯЫљеЙЪОЕФаХЯЂгЩЛсдБздааЬсЙЉЃЌФкШнЕФецЪЕадЁЂзМШЗадКЭКЯЗЈадгЩЗЂВМЛсдБИКд№ЁЃЛњЕчжЎМвЖдДЫВЛГаЕЃШЮКЮд№ШЮЁЃ гбЧщЬсабЃКЮЊЙцБмЙКТђЗчЯеЃЌНЈвщФњдкЙКТђЯрЙиВњЦЗЧАЮёБиШЗШЯЙЉгІЩЬзЪжЪМАВњЦЗжЪСПЁЃ |
ЛњЕчжЎМвЭј - ЛњЕчаавЕШЈЭўЭјТчаћДЋУНЬх
ЙигкЮвУЧ | СЊЯЕЮвУЧ | ЙуИцКЯзї | ИЖПюЗНЪН | ЪЙгУАяжњ | ЛсдБжњЪж | УтЗбСДНгCopyright 2011 jdzj.com All Rights ReservedММЪѕжЇГжЃККМжнБѕаЫПЦММгаЯоЙЋЫО
ЯњЪлШШЯпЃК0571-28292387  дкЯпПЭЗўЃК0571-87774297
еЙЛсКЯзї/гбЧщСЌНгЃК0571-87774298
дкЯпПЭЗўЃК0571-87774297
еЙЛсКЯзї/гбЧщСЌНгЃК0571-87774298
ЭјеОЗўЮёзЩбЏЃК0571-28292385
ЭЖЫпШШЯпЃК400-6680-889(ЗжЛњ7)
ЭјеООгЊаэПЩжЄ:еуB2-20080178







 ЭМ2. ЖрЖЮPTOВйзїЕФАќТчБэИёЪНЖдБШ
ЭМ2. ЖрЖЮPTOВйзїЕФАќТчБэИёЪНЖдБШ