6ES7522-1BH10-0AA0
FB284ЙІФмЫЕУї
 ДјдіСПБрТыЦїV90ЃЌЪЙгУВЮПМЕВПщ+БрТыЦїСуТіГхЗНЪНЛиСуЪБЃЌВЮПМЕВПщЛиСуПЊЙиНгЕНФФРяЃЌдѕбљХфжУ
ДјдіСПБрТыЦїV90ЃЌЪЙгУВЮПМЕВПщ+БрТыЦїСуТіГхЗНЪНЛиСуЪБЃЌВЮПМЕВПщЛиСуПЊЙиНгЕНФФРяЃЌдѕбљХфжУ
ЛиСуПЊЙиСЌНгЕНвЛИіPLCЕФЪ§зжСПЪфШыЕуЃЌPLCФкБрГЬНЋЦфзДЬЌЙиСЊЕНFB284ЙІФмПщConfigEPosЪфШыв§НХЕФbit6ЁЃ
ЃЈ1ЃЉНЋV90ВЮЪ§P29240ЩшжУЮЊ1(бЁдёВЮПМЕВПщ+СуТіГхЗНЪНЛиСу);
ЃЈ2ЃЉНЋЛиСуПЊЙиСЌНгЕНвЛИіPLCЕФЪ§зжСПЪфШыЕу;
ЃЈ3ЃЉдкPLCФкБрГЬЃЌНЋЛиСуПЊЙиDIЕуЕФзДЬЌЙиСЊЕНFB284ЙІФмConfigEPosЪфШыв§НХЕФbit6;
ЃЈ4ЃЉFB284ЙІФмПщбЁдёЙЄзїФЃЪНModPos=4;
ЃЈ5ЃЉЭЈЙ§ЪфШыВЮЪ§OverVЁЂOverAccЁЂOverDecЫйЖШЁЂМгМѕЫйЖШЕФБЖТЪ(*);
ЃЈ6ЃЉЧ§ЖЏЕФдЫааУќСюEnableAxis=1;
ЃЈ7ЃЉдЫааЬѕМў "CancelTransing" МА "IntermediateStop"БиаыЩшжУЮЊ "1"ЃЌJog1 МА Jog2 БиаыЩшжУЮЊ "0"ЁЃ
ЭЈЙ§ExecuteMode ЕФЩЯЩ§биДЅЗЂЛиСудЫЖЏЁЃЛиСуЭъГЩКѓ"AxisRef"ЪфГіЮЊ1ЁЃ
FB284дѕбљЪЕЯжЖЈЮЛПижЦ
? дЫааФЃЪНбЁдё ModePos=2
? Jog1 МАJog2 БиаыЩшжУЮЊ "0"
? жсБиаывбЛиСуЛђБрТыЦївбБЛаЃзМ
? CancelTransing=1ЃЌIntermediateS*ЃЌ
? ConfigEpos=16#00000003
? ЩшжУФПБъЮЛжУPositionКЭЫйЖШVelocityЃЌВЮЪ§ Positive МА Negative БиаыЮЊ "0"
? ЭЈЙ§ЪфШыВЮЪ§ OverVЁЂOverAccЁЂOverDec ЫйЖШЁЂМгМѕЫйЖШЕФБЖТЪЃЌЭЈГЃВЩШЁФЌШЯЩшжУМДПЩЃЈ*ЃЉЁЃ
? Ч§ЖЏЕФдЫааУќСю EnableAxis=1
? ExecuteModeЩЯЩ§биДЅЗЂЖЈЮЛдЫЖЏ
FB284дѕбљЪЕЯжЯрЖдЖЈЮЛПижЦ
? дЫааФЃЪНбЁдё ModePos=1
? Jog1 МАJog2 БиаыЩшжУЮЊ "0"
? жсПЩвдВЛЛиСуЛђВЛаЃе§жЕБрТыЦї
? CancelTransing=1ЃЌIntermediateS*
? ConfigEpos=16#00000003
? ЩшжУЖЈЮЛГЄЖШPositionКЭЫйЖШVelocityЃЌдЫЖЏЗНЯђгЩPostionИјЖЈЕФе§ИКОіЖЈ
? ЭЈЙ§ЪфШыВЮЪ§ OverVЁЂOverAccЁЂOverDec ЫйЖШЁЂМгМѕЫйЖШЕФБЖТЪЃЌЭЈГЃВЩШЁФЌШЯЩшжУМДПЩЃЈ*ЃЉЁЃ
? Ч§ЖЏЕФдЫааУќСю EnableAxis=1
? ExecuteModeЩЯЩ§биДЅЗЂЖЈЮЛдЫЖЏ
FB284дѕбљЪЕЯжСЌајдЫааФЃЪНПижЦ
"СЌајдЫаа"ФЃЪНдЪаэжсЕФЮЛжУПижЦЦїдке§ЯђЛђЗДЯђвдвЛИіКуЖЈЕФЫйЖШдЫаа
? дЫааФЃЪНбЁдё ModePos=3
? Jog1 МАJog2 БиаыЩшжУЮЊ "0"
? жсВЛБиЛиСуЛђБрТыЦїЮДБЛаЃе§
? CancelTransing=1ЃЌIntermediateS*
? ConfigEpos=16#00000003
? ЭЈЙ§ЪфШыВЮЪ§ Velocity дЫааЫйЖШЃЌдЫааЗНЯђгЩ Positive МА Negative ОіЖЈ
? ЭЈЙ§ЪфШыВЮЪ§ OverVЁЂOverAccЁЂOverDec ЫйЖШЁЂМгМѕЫйЖШЕФБЖТЪЃЌЭЈГЃВЩШЁФЌШЯЩшжУМДПЩЃЈ*ЃЉЁЃ
? Ч§ЖЏЕФдЫааУќСю EnableAxis=1
? ExecuteMode ЕФЩЯЩ§биДЅЗЂЖЈЮЛдЫЖЏ
FB284дѕбљЪЕЯжГЬађПщдЫааПижЦ
ДЫГЬађПщдЫааФЃЪНЭЈЙ§Ч§ЖЏЙІФм"Traversing blocks"РДЪЕЯжЃЌЫќдЪаэздЖЏДДНЈГЬађПщЁЂдЫаажСЕЕПщЁЂЩшжУМАИДЮЛЪфГіЁЃ
вЊЧѓ:
? дЫааФЃЪНбЁдёModePos=6
? ConfigEpos=16#00000003
? жсОВжЙ
? жсБиаывбЛиСуЛђжЕБрТыЦївбаЃе§
ВНжшЃК
? ЙЄзїФЃЪНЁЂФПБъЮЛжУМАЖЏЬЌЯьгІвбдкV90 PNЧ§ЖЏЕФдЫааПщВЮЪ§жаНјааЩшжУЃЌЪфШыВЮЪ§ OverVЁЂOverAccЁЂOverDec ЫйЖШЁЂМгМѕЫйЖШЕФБЖТЪЃЌЭЈГЃВЩШЁФЌШЯЩшжУМДПЩЃЈ*ЃЉЁЃ
? дЫааЬѕМў"CancelTransing" МА "IntermediateStop"БиаыЩшжУЮЊ "1"ЃЌJog1 МА Jog2 БиаыЩшжУЮЊ "0"
? ГЬађПщКХдкЪфШыВЮЪ§ "Position" жаЩшжУЃЌШЁжЕгІЮЊ 0~ 16
? дЫЖЏЕФЗНЯђгЩгыЙЄзїФЃЪНМАГЬађПщжаЕФЩшжУОіЖЈЃЌгыPositive МАNegativeВЮЪ§ЮоЙиЃЌБиаыНЋЫќУЧЩшжУЮЊ"0"ЁЃ
? Ч§ЖЏЕФдЫааУќСюAxisEnable=1
бЁдёГЬађПщКХКѓЭЈЙ§Execute ModeЕФЩЯЩ§биРДДЅЗЂдЫааЁЃ
FB284дѕбљЪЕЯжЕуЖЏ"Jog"ПижЦ
ЕуЖЏдЫааФЃЪНЭЈЙ§Ч§ЖЏЕФ"Jog"ЙІФмРДЪЕЯжЁЃ
вЊЧѓ:
? дЫааФЃЪНбЁдёModePos=7
? ConfigEpos=16#00000003
? жсОВжЙ
? жсВЛБиЛиСуЛђжЕБрТыЦїаЃе§
ВНжшЃК
? ЕуЖЏЫйЖШдкV90 PNжаЩшжУЃЌЫйЖШЕФOverVВЮЪ§ЖдгкЕуЖЏЫйЖШЩшЖЈжЕНјааБЖТЪЫѕЗХЃЌНЈвщЪЙгУФЌШЯжЕ*
? дЫааЬѕМў"CancelTransing" МА "IntermediateStop"гыЕуЖЏдЫааФЃЪНЮоЙиЃЌФЌШЯЩшжУЮЊ "1"
? Ч§ЖЏЕФдЫааУќСю AxisEnable=1
? ИјГіjog1Лђjog2аХКХ
ГЃЙц
ЕЅЛїЪєадЪгЭМжаЕФЁАГЃЙцЁБбЁЯюЃЌНјааЯТСаВЮЪ§ЩшжУЃК
ЁАЯюФПаХЯЂЁБЃКПЩвдБрМУћГЦЃЌзїепМАзЂЪЭЕШаХЯЂЁЃ
ЁАФПТМаХЯЂЁБЃКВщПДCPU ЕФЖЉЛѕКХЃЌзщЬЌЕФЙЬМўАцБОМАЬиадУшЪіЁЃ
ЁАБъЪЖгыЮЌЛЄЁБЃКгУгкБъЪЖЩшБИЕФУћГЦЃЌЮЛжУЕШаХЯЂЃЌ ПЩвдЪЙгУ ЁАGet_IM_DataЁБжИ СюЖСШЁаХЯЂНјааЪЖБ№ЁЃ
ЁАаЃбщКЭЁБЃКдкБрвыЙ§ГЬжаЃЌЯЕЭГНЋЭЈЙ§*ЕФаЃбщКЭРДздЖЏЪЖБ№ PLC ГЬађЁЃЛљгкИУаЃбщКЭЃЌПЩПьЫйЪЖБ№гУЛЇГЬађВЂХаЖЯСНИі PLC ГЬађЪЧЗёЯрЭЌЁЃЭЈЙ§жИСюЁАGetChecksumЁБПЩвдЖСШЁаЃбщКЭЃЌШчЭМ 1 ЫљЪОЃК

ЭМ1 БъЪЖгыЮЌЛЄМАаЃбщКЭ
PROFINET НгПк
ЕЅЛїЁАPROFINETНгПк[X1]ЁБЃЌХфжУвдЯТВЮЪ§ЃК
ЁАГЃЙцЁБЃКБъЪЖPROFINETНгПкЕФУћГЦЃЌзїепКЭзЂЪЭ
ЁАвдЬЋЭјЕижЗЁБЃКШчЭМ 2 ЫљЪОЁЃ

ЭМ2 ХфжУвдЬЋЭјЕижЗ
ЂйЁАНгПкСЌНгЕНЁБЃКПЩвдДгЯТРВЫЕЅжабЁдёБОНгПкСЌНгЕНЕФзгЭјЃЌвВПЩвдЬэМгаТЕФЭјТчЃЛ
ЂкЁАIP авщЁБЃКФЌШЯЮЊЁАдкЯюФПжаЩшжУIP ЕижЗЁБЃЌДЫЪБдкЯюФПзщЬЌжаЩшжУIPЕижЗЃЌзгЭјбкТыЕШЁЃШчЙћЪЙгУТЗгЩЦїЃЌдђМЄЛюЁАЪЙгУТЗгЩЦїЁБЃЌВЂЩшжУТЗгЩЦїЕижЗЁЃвВПЩвдбЁдёЁАдкЩшБИжажБНгЩшЖЈ IP ЕижЗЁБЃЌдђПЩвддкГЬађжаЪЙгУжИСюЁАT_CONFIGЁБЗжХфIP ЕижЗЃЛ
ЂлЁАPROFINETЁБЃК
МЄЛюЁАдкЩшБИжажБНгЩшЖЈPROFINET ЩшБИУћГЦЃЌдђБэЪОВЛдкгВМўзщЬЌжазщЬЌЩшБИУћГЦЃЌЖјЪЧдкГЬађжаЪЙгУжИЁАT_CONFIGЁБЩшжУЩшБИУћЁЃ
МЄЛюЁАздЖЏЩњГЩPROFINET ЩшБИУћГЦЁБ,TIA ВЉЭОИљОнНгПкУћГЦздЖЏЩњГЩPROFINETЩшБИУћГЦЁЃ
ЁАзЊЛЛЕФУћГЦЁБЃЌЪЧжИДЫPROFINET ЩшБИУћГЦзЊЛЛЮЊЗћКЯ DNS ЙпР§ЕФУћГЦЃЌгУЛЇВЛФмаоИФЁЃ
ЁАЩшБИБрКХЁБЃЌЪЧжИ PROFINET IO ЩшБИЕФБрКХЁЃдкЗЂЩњЙЪеЯЪБПЩвдЭЈЙ§БрГЬЖСШЁИУБрКХЁЃЖдгкIO ПижЦЦїФЌШЯЮЊ0ЃЌ ЮоЗЈаоИФЁЃ
ЁАЪБМфЭЌВНЁБЃК
ПЩвдМЄЛюЁАЭЈЙ§NTP ЗўЮёЦїЦєЖЏЭЌВНЪБМфЁБЁЃNTPЃЈNetwork Time ProtocolЃЉ МДЭјТчЪБМфавщЃЌПЩгУгкЭЌВНЭјТчжаЯЕЭГЪБжгЕФвЛжжЭЈгУЛњжЦЁЃПЩвдЪЕЯжПчзгЭјЕФЪБМфЭЌВНЃЌОЋЖШдђШЁОігкЫљЪЙгУЕФNTP ЗўЮёЦїКЭЭјТчТЗОЖЕШЬиадЁЃдкNTP ЪБМфЭЌВНФЃЪНЯТЃЌCPU ЕФНгПкАДЩшЖЈЕФЁАИќаТМфИєЁБЪБМфЃЈЕЅЮЛЮЊУыЃЉДг NTP ЗўЮёЦїЖЈЪБЛёШЁЪБжгЭЌВНЃЌЪБМфМфИєЕФШЁжЕЗЖЮЇдк10УыЕНвЛЬьжЎМф, етРяЖрПЩвдЬэМг4ИіNTPЗўЮёЦїЁЃ
ЁАCPUгыИУЩшБИжаЕФФЃПщНјааЪ§ОнЭЌВНЁБЃКЪЧжИЭЌВН CM/CP ЕФЪБМфКЭCPU ЕФЪБМфЁЃ
 зЂвтЃК
зЂвтЃК
НЈвщдкCM/CPКЭCPUжаЃЌжЛЖдвЛИіФЃПщНјааЪБМфЭЌВНЃЌвдБуЪЙеОФкЕФЪБМфБЃГж*ЁЃ
ЁАВйзїФЃЪНЁБЃК
ПЩвдЩшжУЁАIO ПижЦЦїЁБЛђЪЧ ЁАIOЩшБИЁБЁЃШчЙћИУ CPU зїЮЊжЧФмЩшБИЃЌдђМЄЛюЁАIOЩшБИЁБЃЌВЂдкЁАвбЗжХфЕФ IO ПижЦЦїжаЁБЃЌ бЁдёИУIO ЩшБИЕФIO ПижЦЦїЃЈШчЙћ IO ПижЦЦїВЛдкЭЌвЛЯюФПжаЃЌдђбЁдёЁАЮДЗжХфЁБЃЉЁЃВЂИљОнашвЊбЁдёЪЧЗёМЄЛюЁАPN НгПкЕФВЮЪ§гЩЩЯЮЛ IO ПижЦЦїНјааЗжХфЁБКЭЁАгХЯШЦєгУЁБЕШВЮЪ§ЃЌвдМАЩшжУжЧФмЩшБИЕФЭЈаХДЋЪфЧјЕШЁЃ
ИпМЖбЁЯюЃКПЩвдЖдЁАНгПкбЁЯюЁБЃЌЁАНщжЪШпгрЁБЃЌЁАЪЕЪБЩшЖЈЁБКЭЁАЖЫПкЁБНјааЩшжУЁЃ
ЁАWeb ЗўЮёЦїЗУЮЪЁБЃК
МЄЛюЁАЦєгУЪЙгУИУНгПкЗУЮЪ Web ЗўЮёЦїЁБЃЌдђПЩвдЭЈЙ§ИУНгПкЗУЮЪМЏГЩдк CPU ФкВПЕФ Web ЗўЮёЦїЁЃ
ЁАгВМўБъЪЖЗћЁБЃКНгПкЕФеяЖЯЕижЗ
Ъ§зжСПЪфШыЪфГі
ЁАГЃЙцЁБЃКЕЅЛїЪ§зжСПЪфШы/ЪфГіЕФЁАГЃЙцЁБбЁЯюПЩвдЪфШыЯюФПаХЯЂЃК
-
ЁАУћГЦЁБЃКЖЈвхИќИФзщМўЕФУћГЦ
-
ЁАзЂЪЭЁБЃКЫЕУїФЃПщЛђЩшБИЕФгУЭО
ЁАЪ§зжСПЪфШыЁБЃКвдЭЈЕР0 ЕФзщЬЌЮЊР§НјааЫЕУїЃЌШчЭМ 3 ЫљЪОЁЃ

ЭЈЙ§ЖрЕуНгПк (MPI) ЪЕЯжЪ§ОнЭЈаХ
зЂвтЪЙгУFB283ПижЦV90ЪБЃЌЙІФмПщЪфШыв§НХAXIS_NOБиаыЩшжУЮЊ2ЁЃ
 дѕбљЩшжУЮЊЛњаЕНсЙЙЁЂМѕЫйБШЁЂФЃЬЌжсЃЌФЃЬЌЗЖЮЇдѕУДЩшжУЃП
дѕбљЩшжУЮЊЛњаЕНсЙЙЁЂМѕЫйБШЁЂФЃЬЌжсЃЌФЃЬЌЗЖЮЇдѕУДЩшжУЃП
ашвЊЪЙгУV-AssistantШэМўЃЌдкЁАЩшжУВЮЪ§ЁБжаЕФЁАЩшжУЛњаЕНсЙЙЁБЛУцжаНјааЩшжУЁЃ
EPOS ПЩвдЪЕЯжЮЛжУЭЌВНПижЦТ№ЃП
ВЛПЩвдЃЌжЛЪЧЪЕЯжЕЅжсЕФЖЈЮЛПижЦЃЌЭЌВНПижЦашвЊ1500(T)+V90 PNзщЬЌЙЄвеЖдЯѓЁЃ
FB284ШчКЮЖдConfigEposЙмНХНјааХфжУЃП
FB284ЕФConfigEPosЪфШыв§НХЕФвдЯТПижЦЮЛгыV90гаЙиЃК
BIT0ЃКOFF2здгЩЭЃГЕ(1=УЛгаНћжЙТіГх)ЃЛ
BIT1ЃКOFF3НєМБЭЃГЕ(1=УЛгаНћжЙТіГх)ЃЛ
BIT2ЃКШэЯоЮЛЃЈ1=МЄЛюШэЯоЮЛЙІФмЃЉЃЛ
BIT3ЃКгВЯоЮЛЃЈ1=МЄЛюгВЯоЮЛЙІФмЃЉЃЛ
BIT6ЃКЭтВПСуЮЛПЊЙиаХКХдДЃЛ
BIT7ЃКЩЯЩ§би=ЭтВПГЬађЖЮИќИФЃЛ
BIT8ЃКГжајДЋЪфMDIЩшЖЈжЕЃЈ1=МЄЛюЃЉЁЃ
вЊЪЙФмжсЃЌжСЩйвЊНЋConfigEPosЕФBIT0КЭBIT1БЃГжЮЊ1ЁЃПЩЭЈЙ§ДЫЗНЪНДЋЪфгВМўЯоЮЛЪЙФмЁЂЛиСуПЊЙиаХКХЕШИјV90ЃЌЦфгрЮЛИљОнЫљашЙІФмЩшжУЁЃ
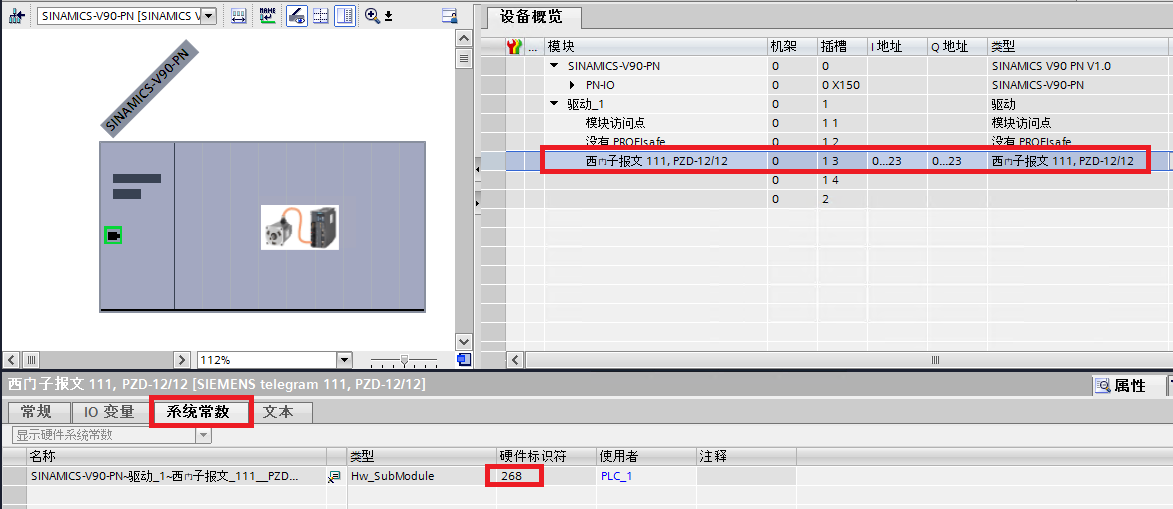
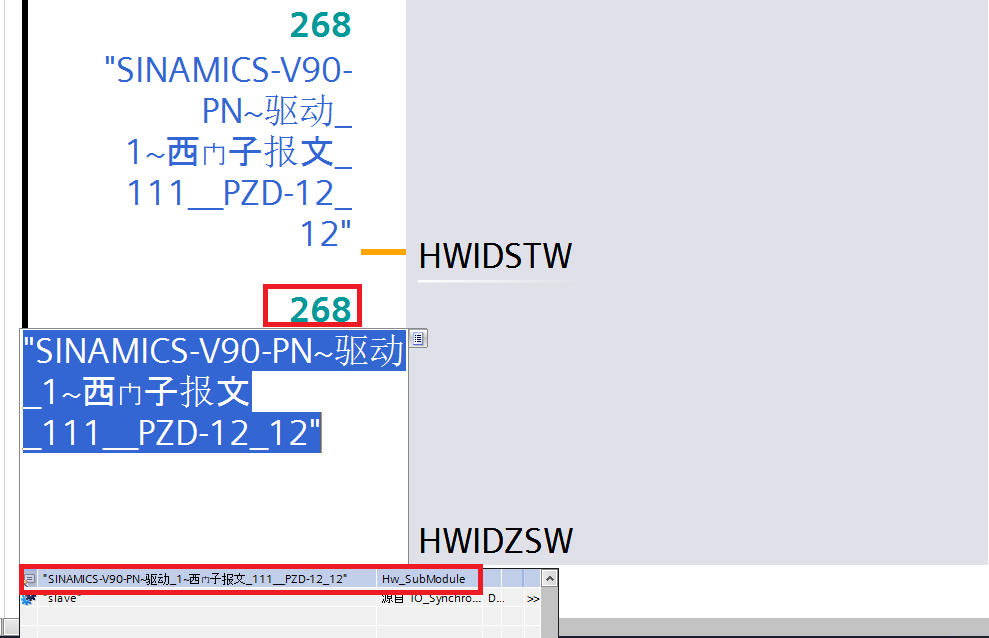
FB284жаHWIDSTW/HWIDZSWдѕУДЬюаДЃП
етСНДІЪфШыЙмНХЭЈЙ§ВщПД111ЭЈбЖБЈЮФгВМўБъЪЖЗћЛђепдкЪфШыЙмНХЯТРВЫЕЅжабЁдёХфжУЕФ111БЈЮФРДШЗЖЈЃК
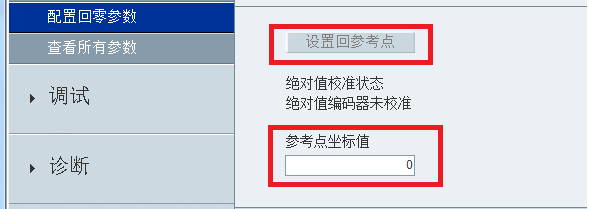
жЕБрТыЦїШчКЮЛиСуЃП
EPOSжажЕБрТыЦїаЃзМ(3жжЗНЪН)ЃК
(1). ЭЈЙ§V-ASSISTANTШэМўЩшжУ
-
ЩшжУЕчЛњЕБЧАЮЛжУЖдгІЕФВЮПМЕуЮЛжУзјБъжЕЃЌФЌШЯЮЊ0
-
ЕуЛїЩшжУЛиВЮПМЕуАДХЅ
-
жДааБЃДцВЮЪ§ЕНROM


 дкЯпзЩбЏ
дкЯпзЩбЏ 

 дкЯпПЭЗўЃК0571-87774297
дкЯпПЭЗўЃК0571-87774297


